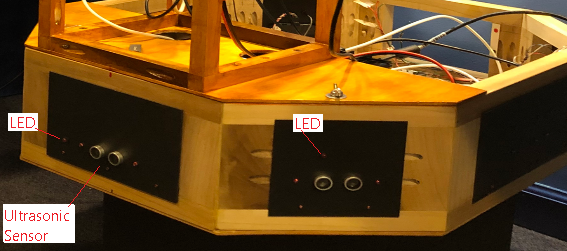
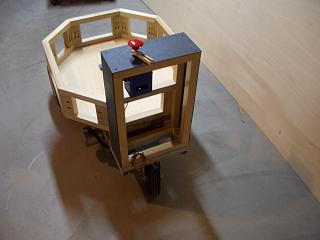
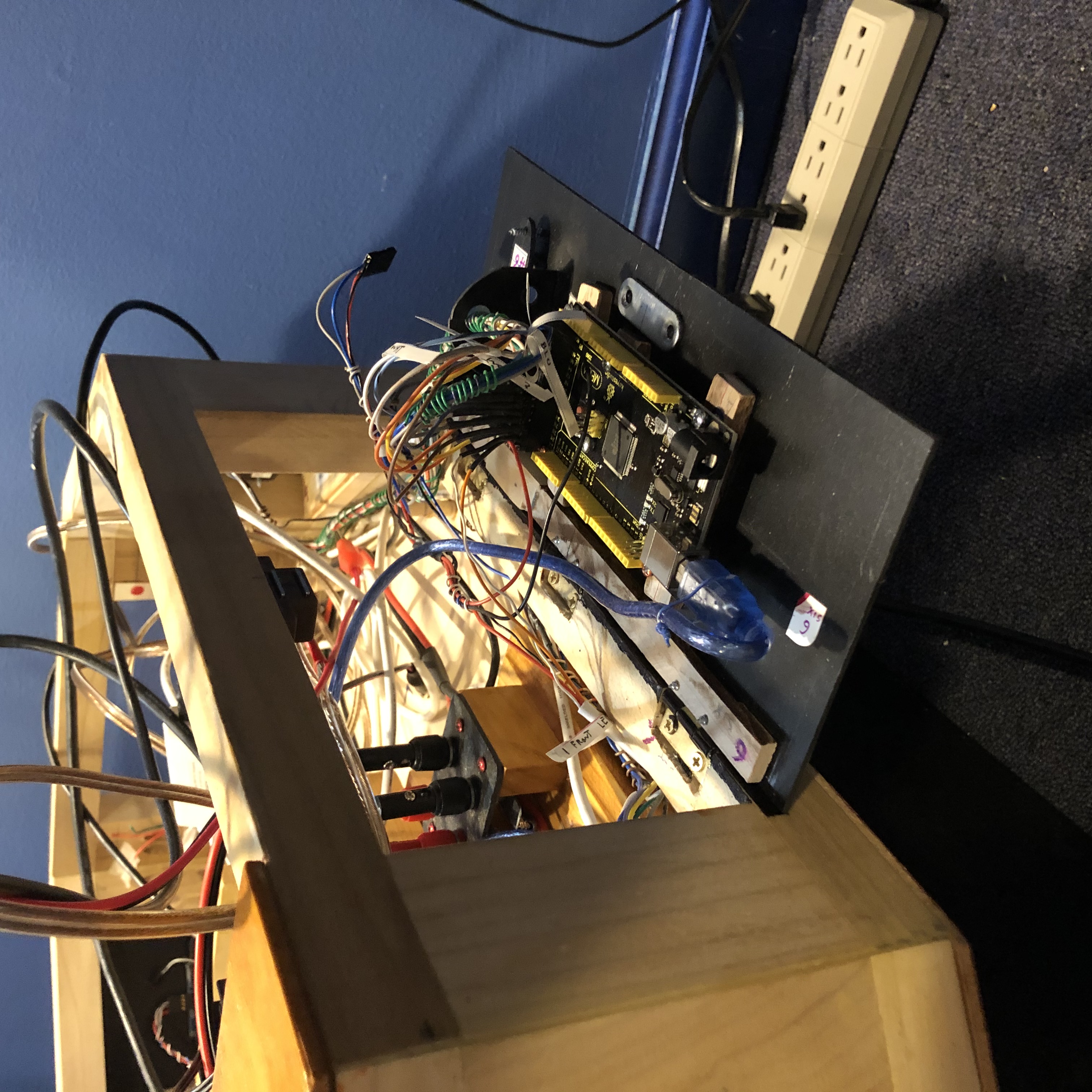
The Octogon shape is so that sensors mounted here would point all around the robot.
These photos were taken before the control panel was mounted.
This early version has only six power switches on the front of the power section.
The newer version has ten switchs and each switch contains an LED.

The red "E-Stop" switch can be seen mounted on the control panel section.

See the "Parts" page on this site for additional info.

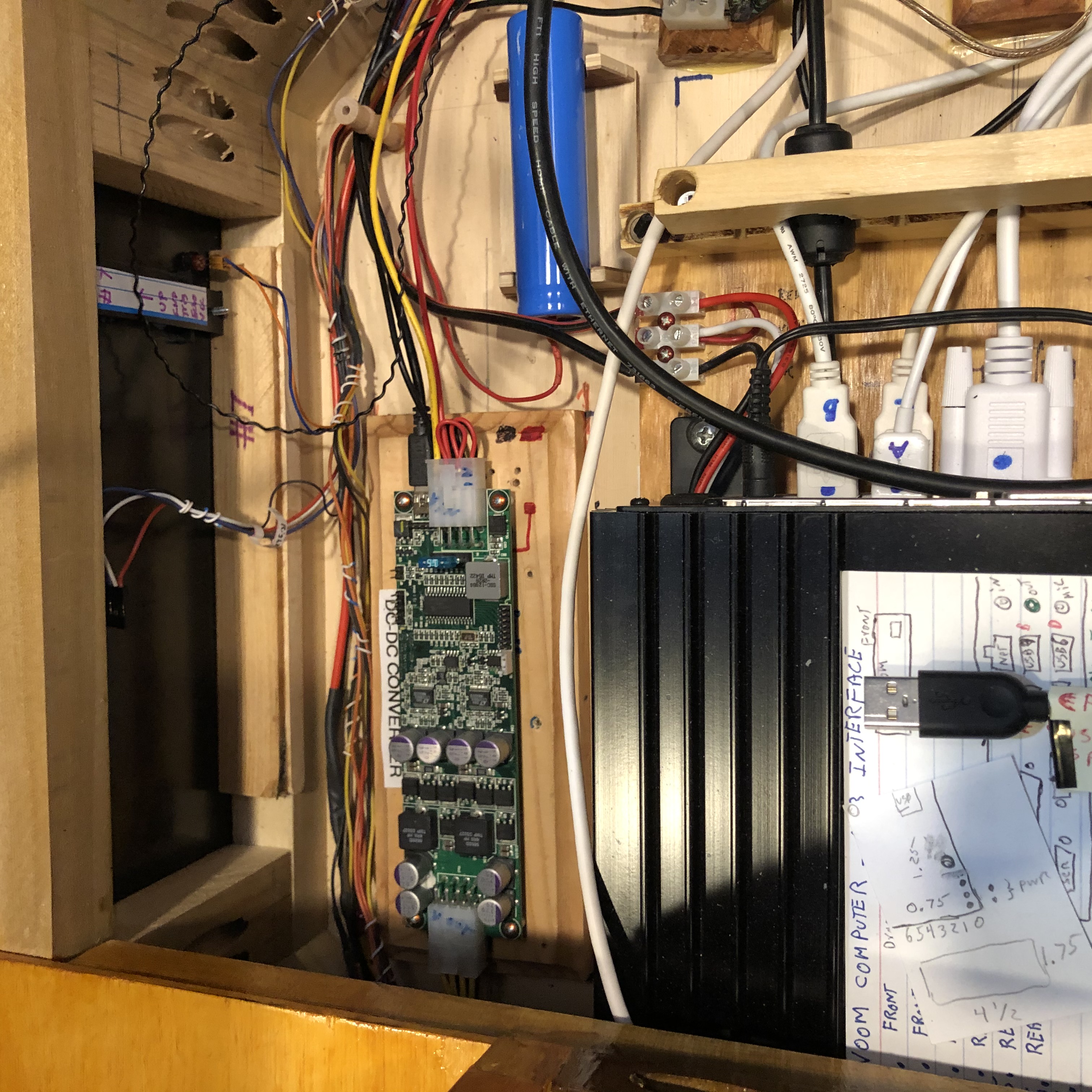
You can see the cable connections mounted to the rear of the PC. The cables then pass through a "Strain Relief" device, that protects the connectors from "Bounces"
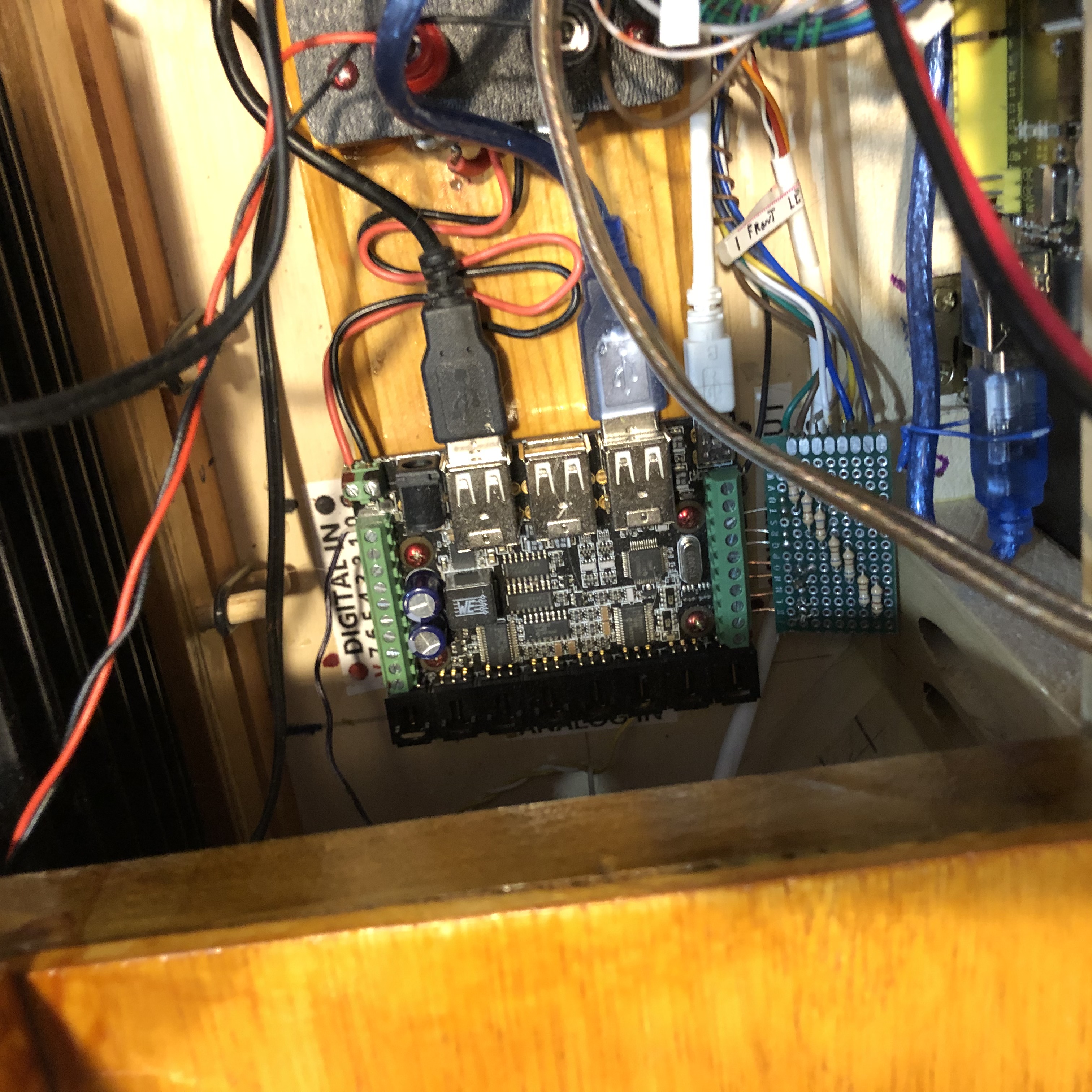
Below the Phidgets card is a small board containing resistors, and then connections to 8 LEDs ( One on each octagon face. The LEDs are to be used to tell me if the ultrasonic sensor detects an object blocking the path of the robot.