|
1.
|

|
The computer section is an "Irregular Octagon" built from 1 inch by 1 inch Spruce Beams.
The Octogon shape is so that sensors mounted here would point all around the robot.
These photos were taken before the control panel was mounted.
|
|
2.
|

|
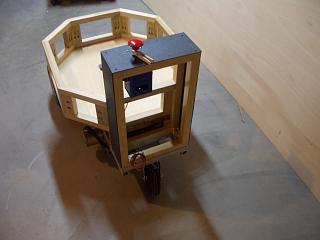
Octagonal Computer section mounted atop the drive section.
The red "E-Stop" switch can be seen mounted on the control panel section.
|
|
3.
|
|
Empty computer section and almost empty control panel section.
|
|
4.
|
|
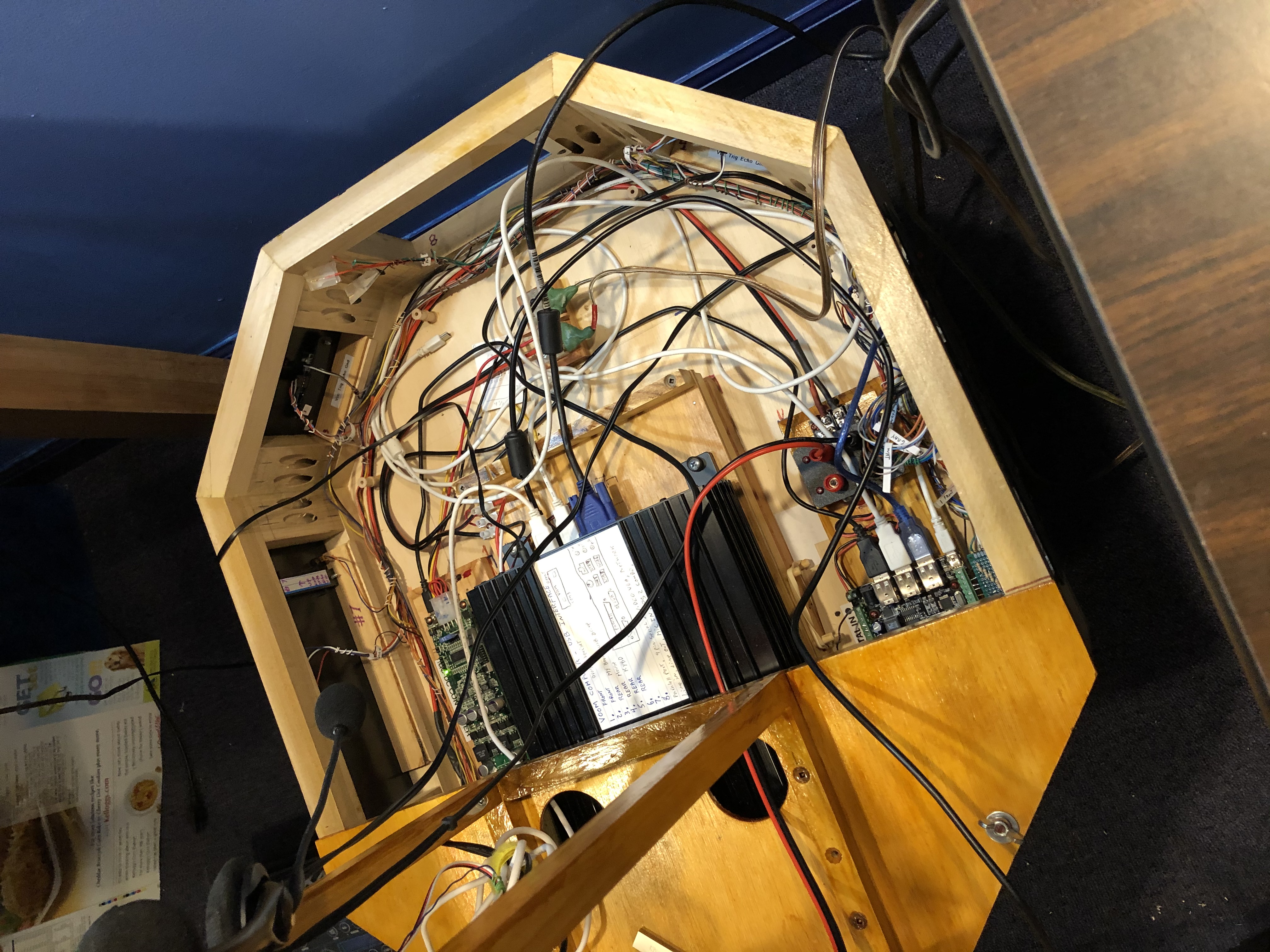
Inside the computer section, is a DC-DC converter, an Arduino 2560, a Phidgets 888 I/O board and the PC. The PC is a "Carputer" ( It runs on 12 volts DC)
See the "Parts" page on this site for additional info.
|
|
5.
|

|
The Computer is mounted on a panel, that sits on a foam rubber cushion. This is to avoid any shocks to the computer generated by rough terrain or crashes.
|
|
6.
|
|
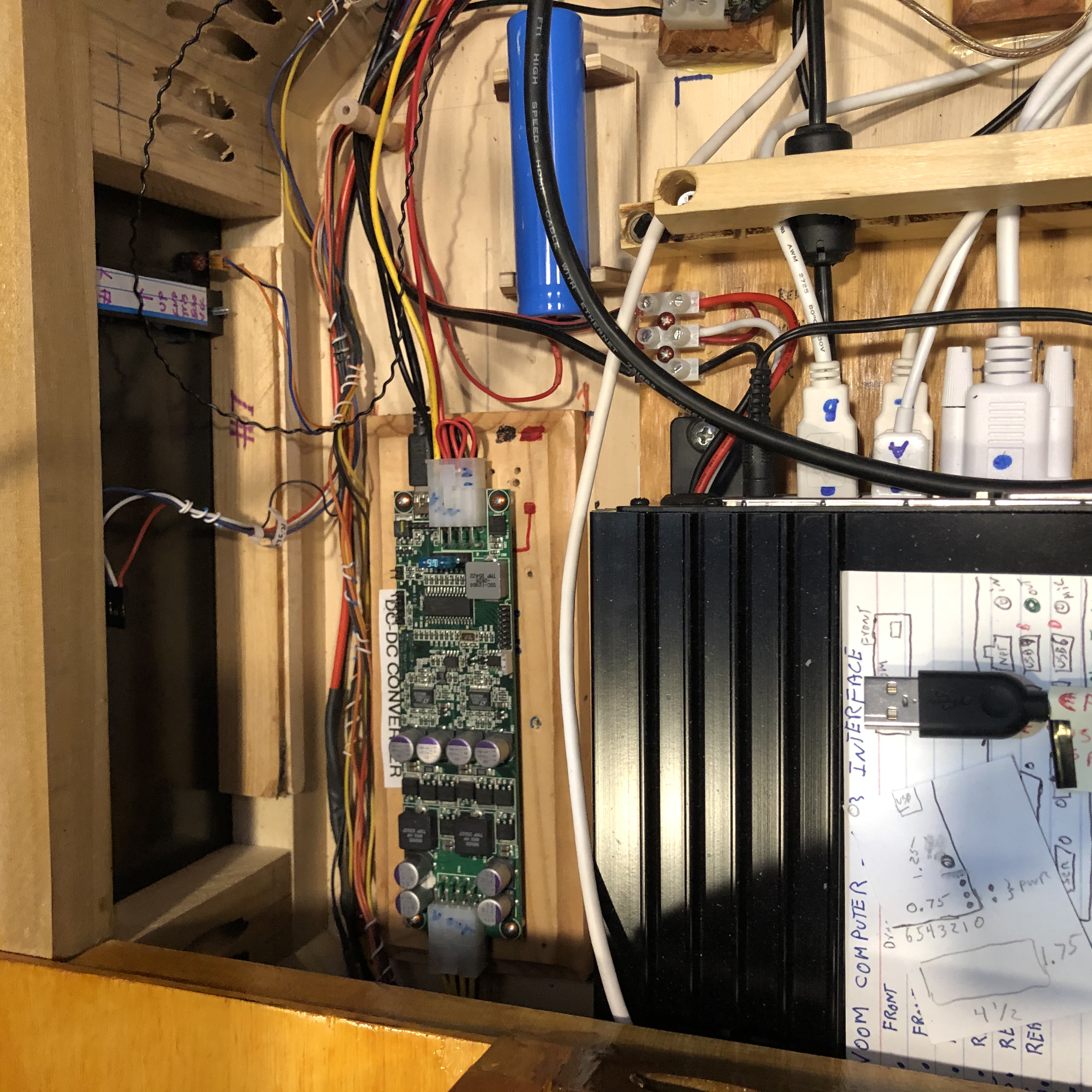
DC DC converter, inside the Computer section.
You can see the cable connections mounted to the rear of the PC. The cables then pass through a "Strain Relief"
device, that protects the connectors from "Bounces"
|
|
7.
|
|
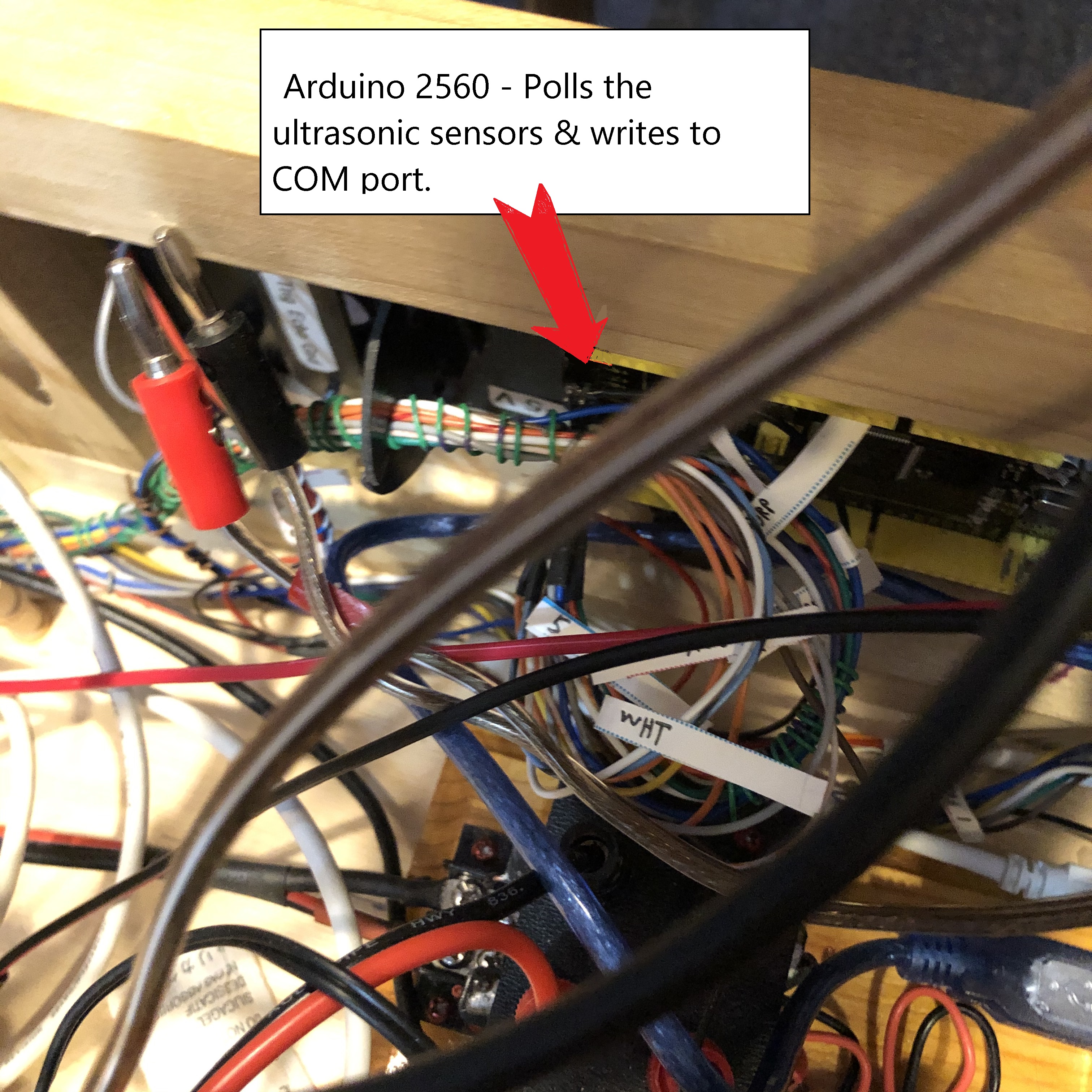
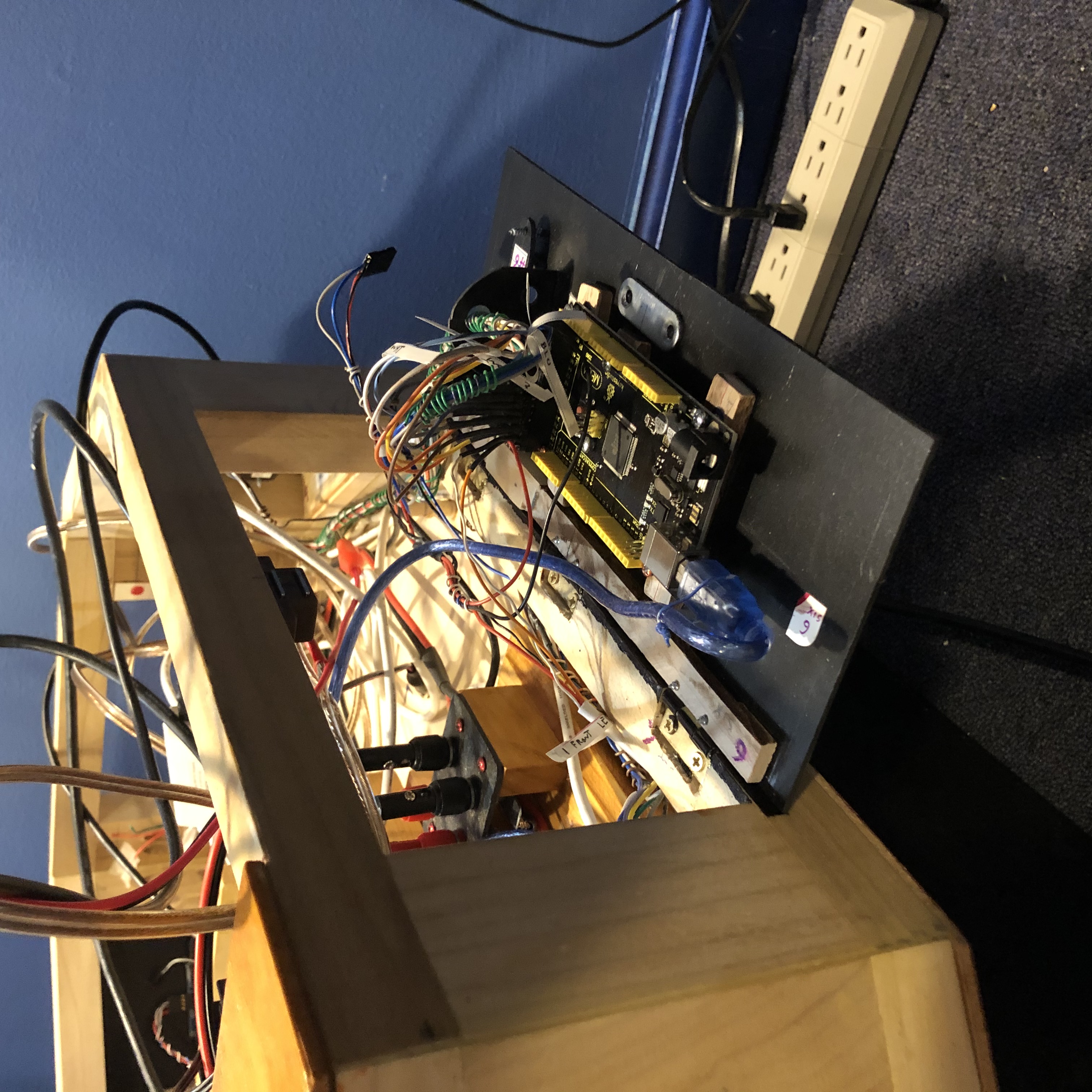
The Arduino is mounted on a hinged side panel that can be opened for easy access.
|
|
8.
|
|
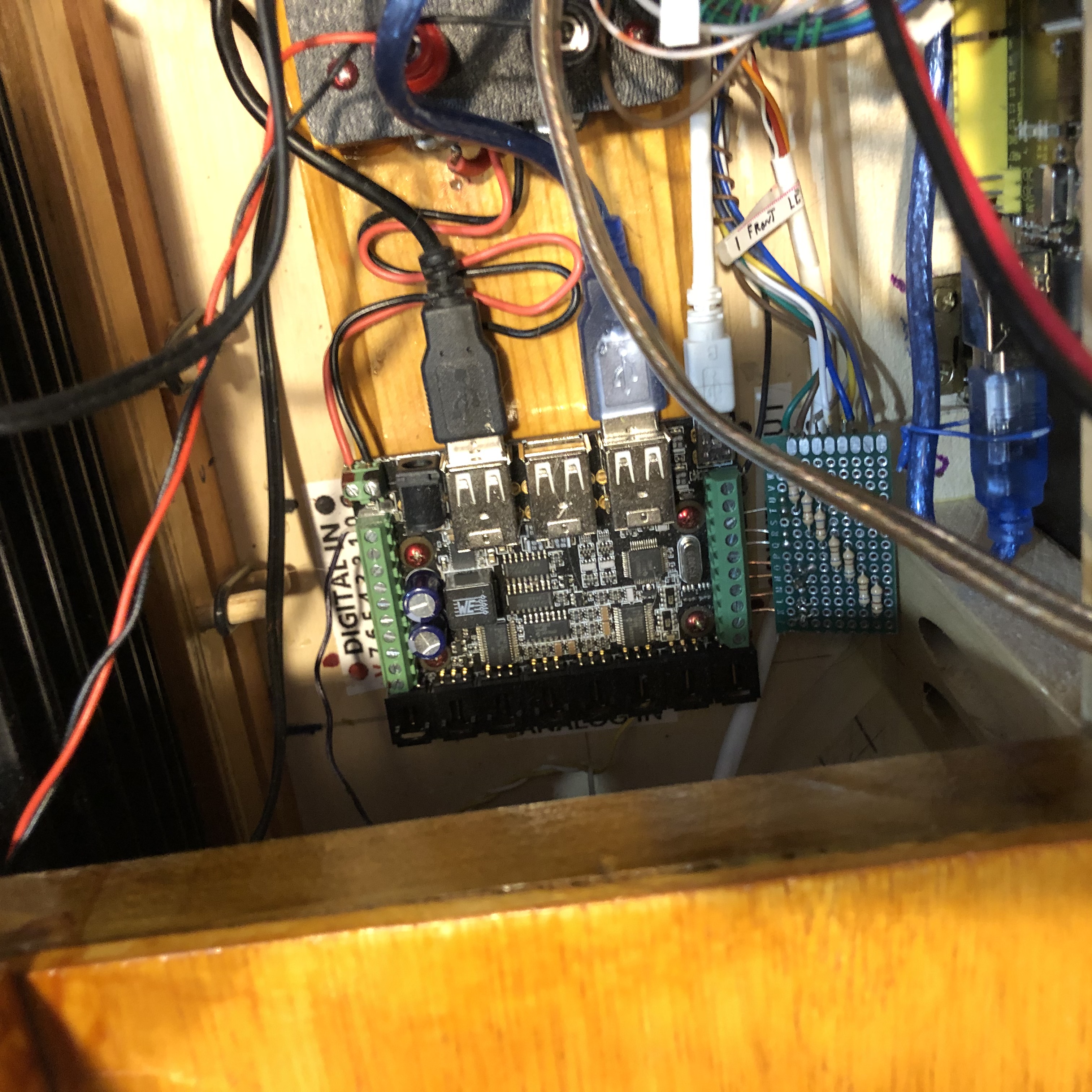
The Phidgets I/O card has 8 digital output ports, 8 digital input ports, 8 analog ports, and a 6 port USB hub.
Below the Phidgets card is a small board containing resistors, and then connections to 8 LEDs ( One on each octagon face. The LEDs are to be used to tell me if the ultrasonic sensor detects an object blocking the path of the robot.
|
|
9.
|
|
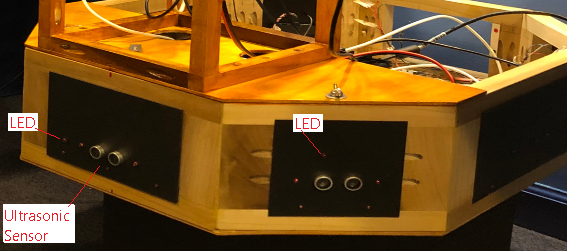
Each face of the octagon contains an LED and an Ultrasonic range finder.
As of June 2023, the little red LEDs were replaced with larger, amber truck marker lights.
|